|
|
Română |
|
Deutsch |
|
English |
Vectori
O serie de mărimi fizice (deplasarea, viteza, forța,...) au caracter vectorial: pentru a fi determinate complet este necesară precizarea următoarelor elemente:
· punctul de aplicație sau originea vectorului;
· direcția;
· sensul;
· mărimea sau modulul vectorului.
Uneori primul element nu are relevanță. Celelalte 3 elemente sunt însă întotdeauna obligatorii.
Compunerea vectorilor
Compunerea
vectorilor, numită și suprapunerea vectorilor sau suma
vectorială este o operație matematică în care intervin cel
puțin doi vectori, care duce la determinarea unui vector rezultant, care
în anumite privințe este echivalent cu setul de vectori care se compun
(operanzii).
Compunerea a două forțe:
Se consideră
două forțe ![]() și
și
![]() cu
punct de aplicație comun. Rezultanta lor
cu
punct de aplicație comun. Rezultanta lor ![]() este o forță echivalentă, care
ar produce același efect ca și cele două forțe care acționează
simultan. Vectorul rezultant
este o forță echivalentă, care
ar produce același efect ca și cele două forțe care acționează
simultan. Vectorul rezultant ![]() poate fi determinat printr-o metodă
grafică sau printr-o metodă analitică.
poate fi determinat printr-o metodă
grafică sau printr-o metodă analitică.
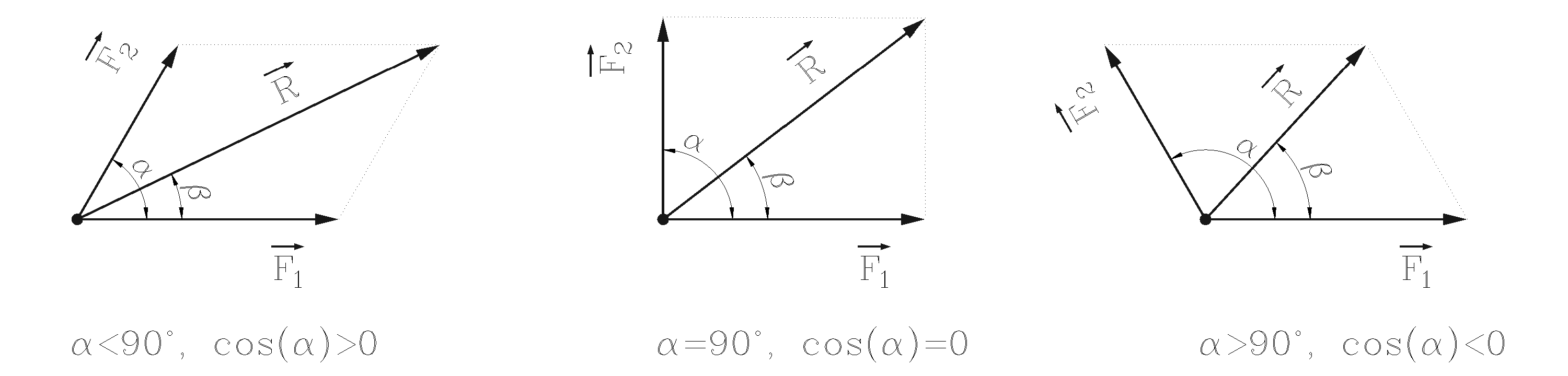
Regula
paralelogramului
Se construiește
un paralelogram având drept laturi vectorii ![]() și
și
![]() și
niște drepte paralele cu aceștia. Rezultanta lor
și
niște drepte paralele cu aceștia. Rezultanta lor ![]() este dată de diagonala care trece prin
punctul de aplicație comun. Mai jos sunt prezentate 3 cazuri, în care
unghiul
este dată de diagonala care trece prin
punctul de aplicație comun. Mai jos sunt prezentate 3 cazuri, în care
unghiul ![]() dintre cei doi vectori este ascuțit,
drept sau obtuz:
dintre cei doi vectori este ascuțit,
drept sau obtuz:
Metoda analitică
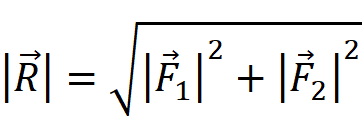
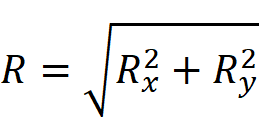
1. Se calculează mărimea (modulul) vectorului ![]() aplicând teorema generalizată a lui
Pitagora:
aplicând teorema generalizată a lui
Pitagora:

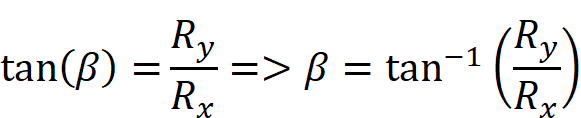
2. Se determină orientarea vectorului ![]() , dată de unghiul său
, dată de unghiul său ![]() față de direcția
orizontală, luată ca direcție de referință:
față de direcția
orizontală, luată ca direcție de referință:

Cazuri particulare:
1. Dacă unghiul dintre vectori este drept (![]() ):
):
 și
și 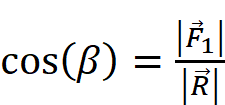
2. Dacă cei doi vectori au aceeași direcție și același
sens (![]() ):
):
![]() și
și ![]()
3. Dacă cei doi vectori au aceeași direcție, dar sensuri opuse
(![]() ):
):
 și
și ![]()
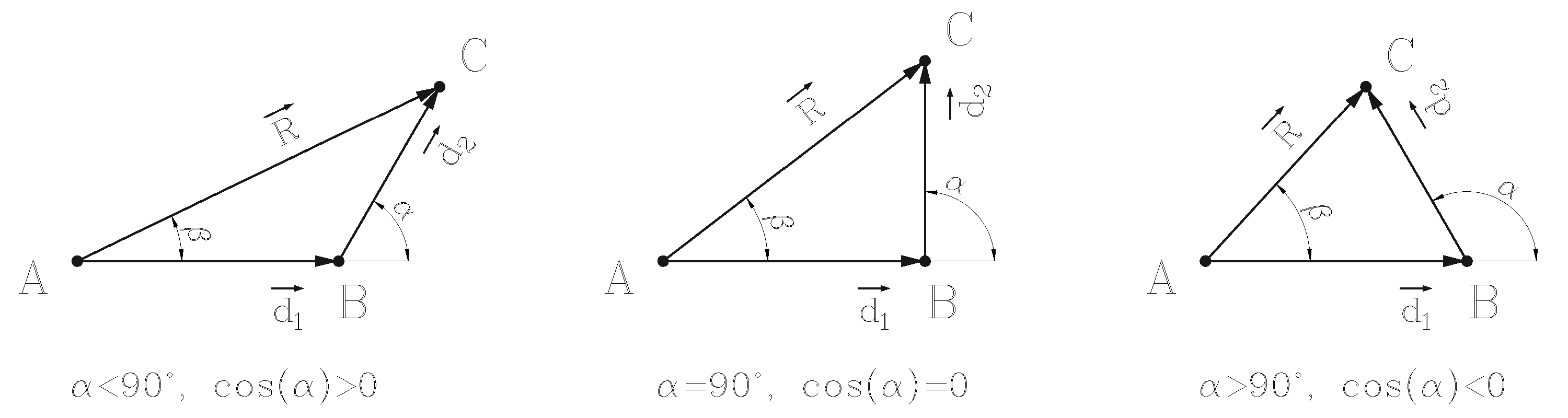
Compunerea a doi vectori de deplasare:
Se consideră o
deplasare de la A la B urmată de o a doua deplasare de la B la C.
Notăm cu ![]() vectorul de deplasare de la A la B și cu
vectorul de deplasare de la A la B și cu ![]() vectorul deplasării de la B la C.
Vectorul rezultant
vectorul deplasării de la B la C.
Vectorul rezultant ![]() semnifică deplasarea directă de la A
la C și se poate determina grafic, prin regula triunghiului:
semnifică deplasarea directă de la A
la C și se poate determina grafic, prin regula triunghiului:
Metoda analitică
pentru determinarea mărimii și orientării vectorului folosește
aceleași formule de la cazul precedent al compunerii forțelor:
1. Se calculează modulul vectorului ![]() :
:

2. Se determină orientarea vectorului ![]() , dată de unghiul său
, dată de unghiul său ![]() față de direcția
orizontală:
față de direcția
orizontală:

Pentru simplitate s-a
notat R în loc de ![]() și
și
![]() ,
, ![]() în
loc de
în
loc de ![]() și
și
![]() .
.
Cazuri particulare:
1. Dacă unghiul dintre vectori este drept (![]() ):
):
![]() și
și ![]()
2. Dacă cei doi vectori au aceeași direcție și același
sens (![]() ):
):
![]() și
și ![]()
3. Dacă cei doi vectori au aceeași direcție, dar sensuri opuse
(![]() ):
):
![]() și
și 
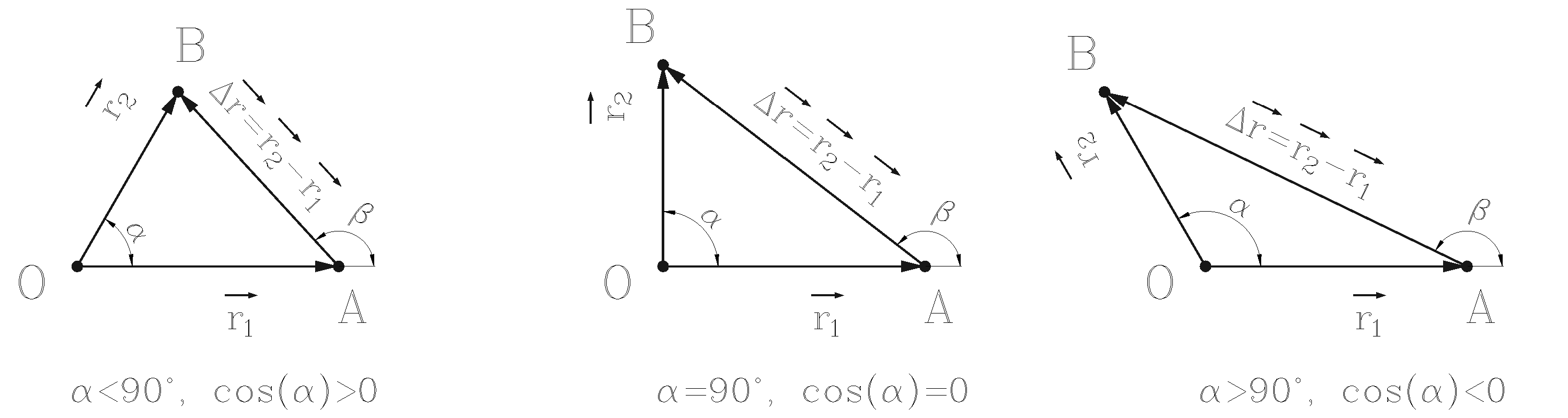
Diferența a doi vectori:
Se consideră
două poziții A și B indicate prin vectorii de poziție ![]() și
și
![]() , care au originea comună O.
Dacă are loc o deplasarea de la A la B, aceasta se exprimă prin
vectorul de deplasare
, care au originea comună O.
Dacă are loc o deplasarea de la A la B, aceasta se exprimă prin
vectorul de deplasare ![]() , care este o diferență vectorială a doi vectori de poziție.
Deplasarea inversă, de la B la A s-ar putea exprima prin vectorul de
deplasare opus
, care este o diferență vectorială a doi vectori de poziție.
Deplasarea inversă, de la B la A s-ar putea exprima prin vectorul de
deplasare opus ![]() .
.
Tot cu ajutorul teoremei generalizate a lui
Pitagora se
determină analitic vectorul diferență (deplasarea) ![]() :
:
1. Se calculează modulul deplasării ![]() :
:

2. Se determină orientarea vectorului ![]() , exprimată prin unghiul său
, exprimată prin unghiul său ![]() față de direcția
orizontală:
față de direcția
orizontală:

Cazuri particulare:
1. Dacă unghiul dintre vectori este drept (![]() ):
):
![]() și
și ![]()
2. Dacă cei doi vectori au aceeași direcție și același
sens (![]() ):
):
![]() și
și 
3. Dacă cei doi vectori au aceeași direcție, dar sensuri opuse
(![]() ):
):
![]() și
și ![]()
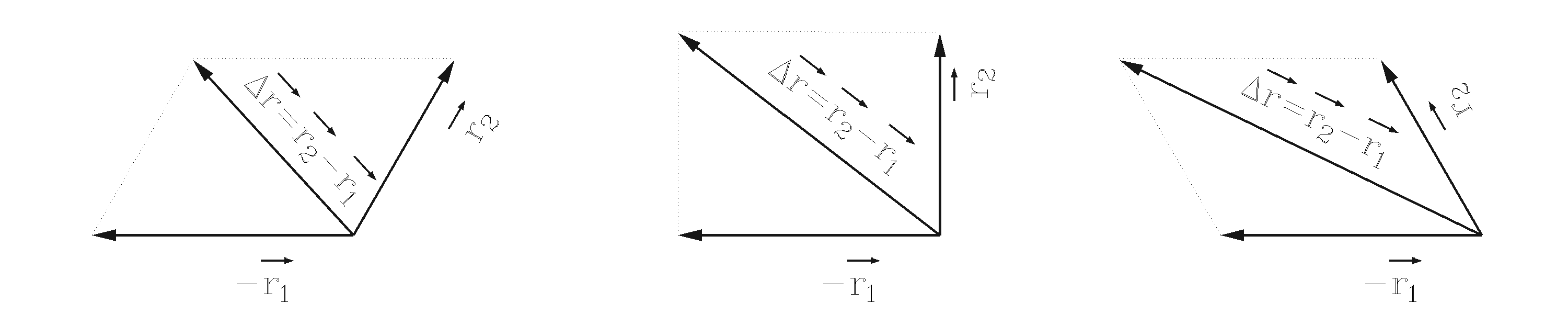
Observații
1. Diferența a doi vectori se poate
trata ca pe o sumă vectorială a vectorilor ![]() și
și
![]() ,
, ![]() fiind opusul vectorului
fiind opusul vectorului ![]() :
:
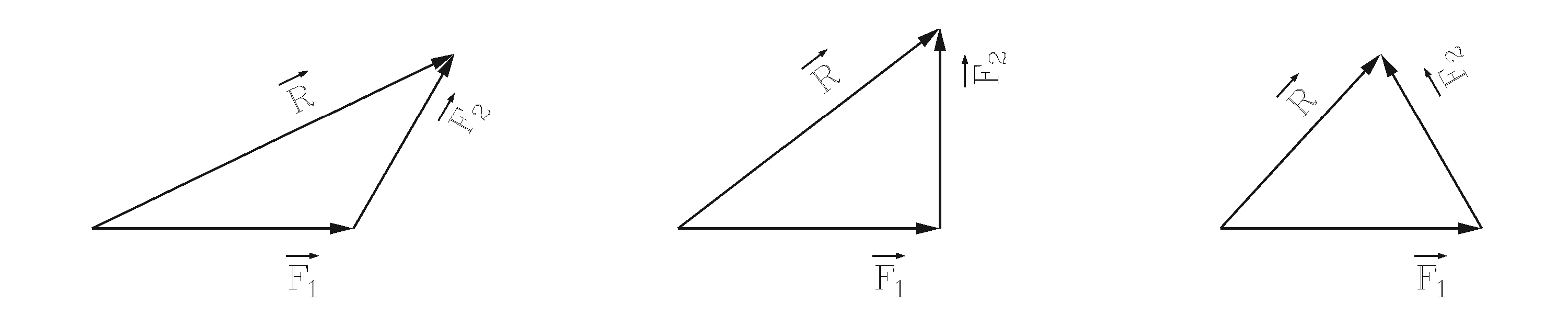
2. Compunerea a două forțe se poate
trata și cu regula triunghiului, dacă translatăm vectorul ![]() astfel încât să-i mutăm originea în
vârful vectorului
astfel încât să-i mutăm originea în
vârful vectorului ![]() . Chiar dacă punctul de aplicație
al unei forțe are importanța lui și în multe cazuri prin
schimbarea lui se schimbă și efectul forței, aplicarea metodei
paralelogramului sau a triunghiului conduc la același rezultat:
. Chiar dacă punctul de aplicație
al unei forțe are importanța lui și în multe cazuri prin
schimbarea lui se schimbă și efectul forței, aplicarea metodei
paralelogramului sau a triunghiului conduc la același rezultat:
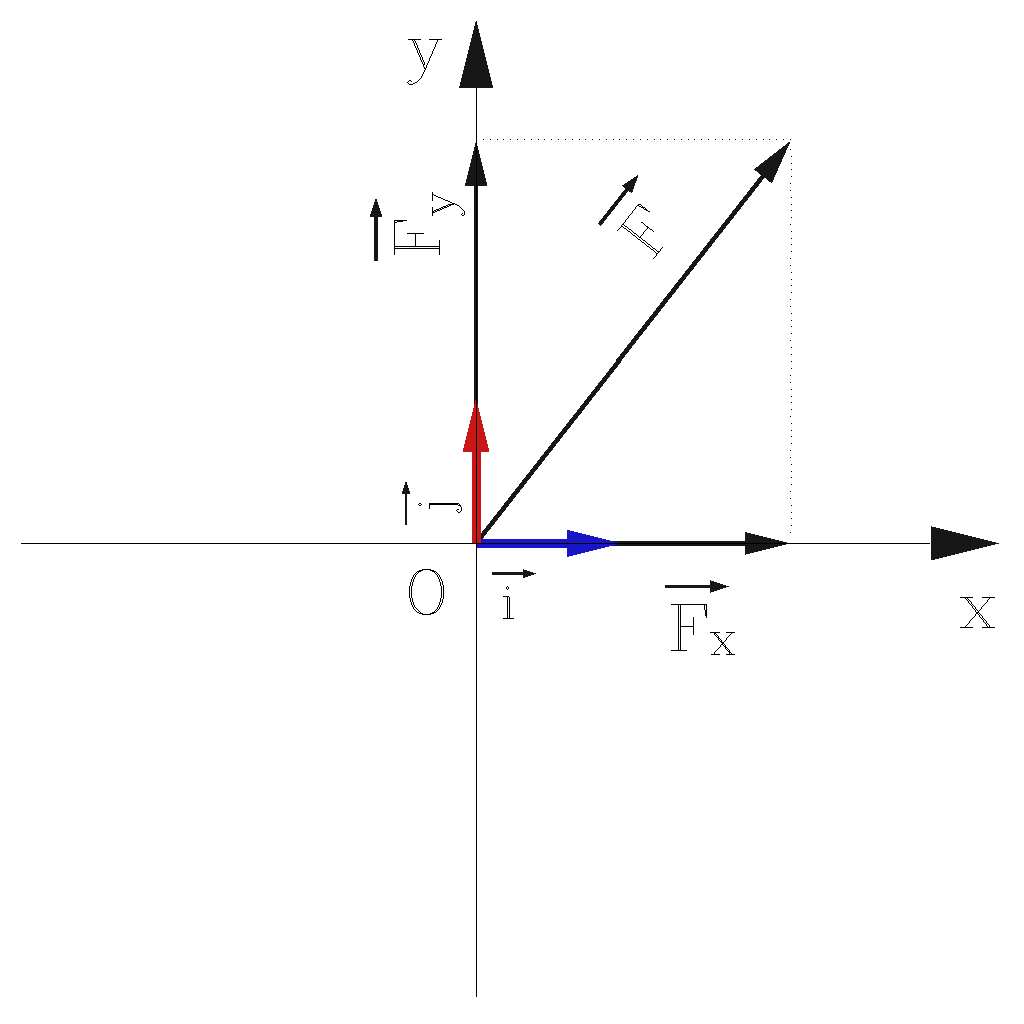
Descompunerea unui vector
Orice vector poate fi
considerat ca fiind rezultatul compunerii a cel puțin doi alți vectori,
pe care îi numim componente ale vectorului respectiv. Descompunerea se poate
realiza în multe moduri, dar pentru două direcții date avem o
descompunere unică în două componente. Considerăm direcțiile
Ox și Oy ale unui sistem de coordonate în plan și descompunem un
vector după aceste două direcții ortogonale: ![]() .
.
![]() și
și
![]() se
numesc componentele vectorului
se
numesc componentele vectorului ![]() după direcțiile Ox și Oy ale sistemului de coordonate respectiv. Un rol important în
descompunerea unui vector îl au versorii
sau vectorii unitate, notați cu
după direcțiile Ox și Oy ale sistemului de coordonate respectiv. Un rol important în
descompunerea unui vector îl au versorii
sau vectorii unitate, notați cu
![]() și
și
![]() . Ei sunt orientați după axele Ox și Oy și au mărimea de o unitate:
. Ei sunt orientați după axele Ox și Oy și au mărimea de o unitate: ![]() . Cu ajutorul lor putem exprima orice
vector, în raport cu sistemul de coordonate respectiv:
. Cu ajutorul lor putem exprima orice
vector, în raport cu sistemul de coordonate respectiv:
![]() .
.
![]() și
și
![]() sunt componentele scalare ale vectorului
sunt componentele scalare ale vectorului ![]() și
au valori pozitive sau negative, după cum componentele vectoriale
și
au valori pozitive sau negative, după cum componentele vectoriale ![]() și
și
![]() sunt îndreptate în sensul pozitiv sau negativ
al axelor Ox și Oy.
sunt îndreptate în sensul pozitiv sau negativ
al axelor Ox și Oy.
Compunerea mai multor vectori
Compunerea mai multor deplasări:
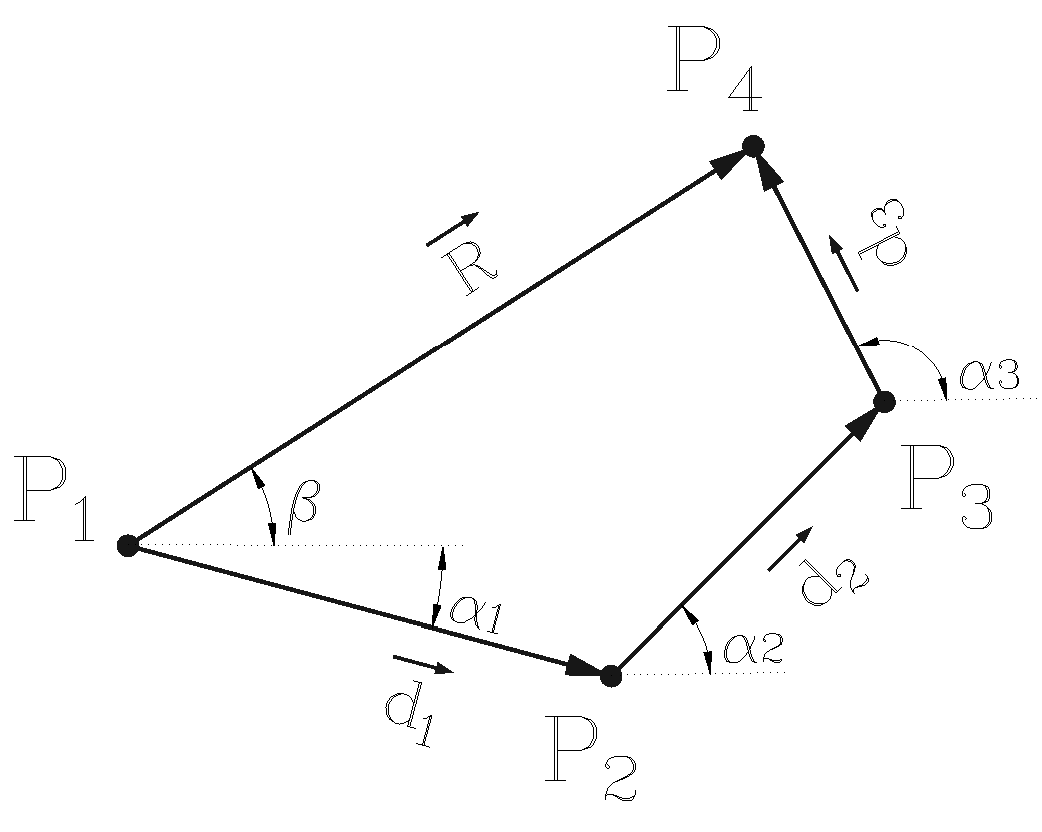
Considerăm 4
puncte P1, P2, P3, P4 și 3
deplasări succesive:
1. deplasarea de la P1 la P2,
reprezentată de vectorul de deplasare ![]() ;
;
2. deplasarea de la P2 la P3,
reprezentată de vectorul de deplasare ![]() ;
;
3. deplasarea de la P3 la P4,
reprezentată de vectorul de deplasare ![]() .
.
Sunt indicate și orientările acestor
vectori față de o direcție de referință (direcția
orizontală), prin unghiurile ![]() .
.
Deplasarea rezultantă ![]() este un vector cu originea în punctul de
plecare P1 și vârful în punctul de sosire P4. Acest
vector reprezintă deplasarea directă de la poziția inițială
la poziția finală. Indiferent care a fost drumul parcurs, rezultatul
final este că s-a schimbat poziția de la P1 la P4.
este un vector cu originea în punctul de
plecare P1 și vârful în punctul de sosire P4. Acest
vector reprezintă deplasarea directă de la poziția inițială
la poziția finală. Indiferent care a fost drumul parcurs, rezultatul
final este că s-a schimbat poziția de la P1 la P4.
Deplasarea rezultantă este suma
vectorială a deplasărilor succesive:
![]() .
.
Acest vector poate fi determinat printr-o
metodă grafică, numită regula
poligonului:
Compunerea mai multor forțe:
Dacă se compun 3
forțe, putem aplica regula paralelogramului succesiv, de două ori,
dar există 3 posibilități de aplicare:
1. Mai întâi se compun vectorii ![]() și
și
![]() , se obține rezultatul parțial
, se obține rezultatul parțial ![]() , apoi se adună vectorial
, apoi se adună vectorial ![]() și
se obține rezultatul final
și
se obține rezultatul final ![]() .
.
2. Se compun vectorii ![]() și
și
![]() , se obține rezultatul parțial
, se obține rezultatul parțial ![]() , la care se adună vectorial
, la care se adună vectorial ![]() și
se obține rezultatul final
și
se obține rezultatul final ![]() .
.
3. Se asociază vectorii ![]() și
și
![]() , care dau rezultatul parțial
, care dau rezultatul parțial ![]() , la care se adaugă vectorul
, la care se adaugă vectorul ![]() și
se obține rezultatul final
și
se obține rezultatul final ![]() .
.
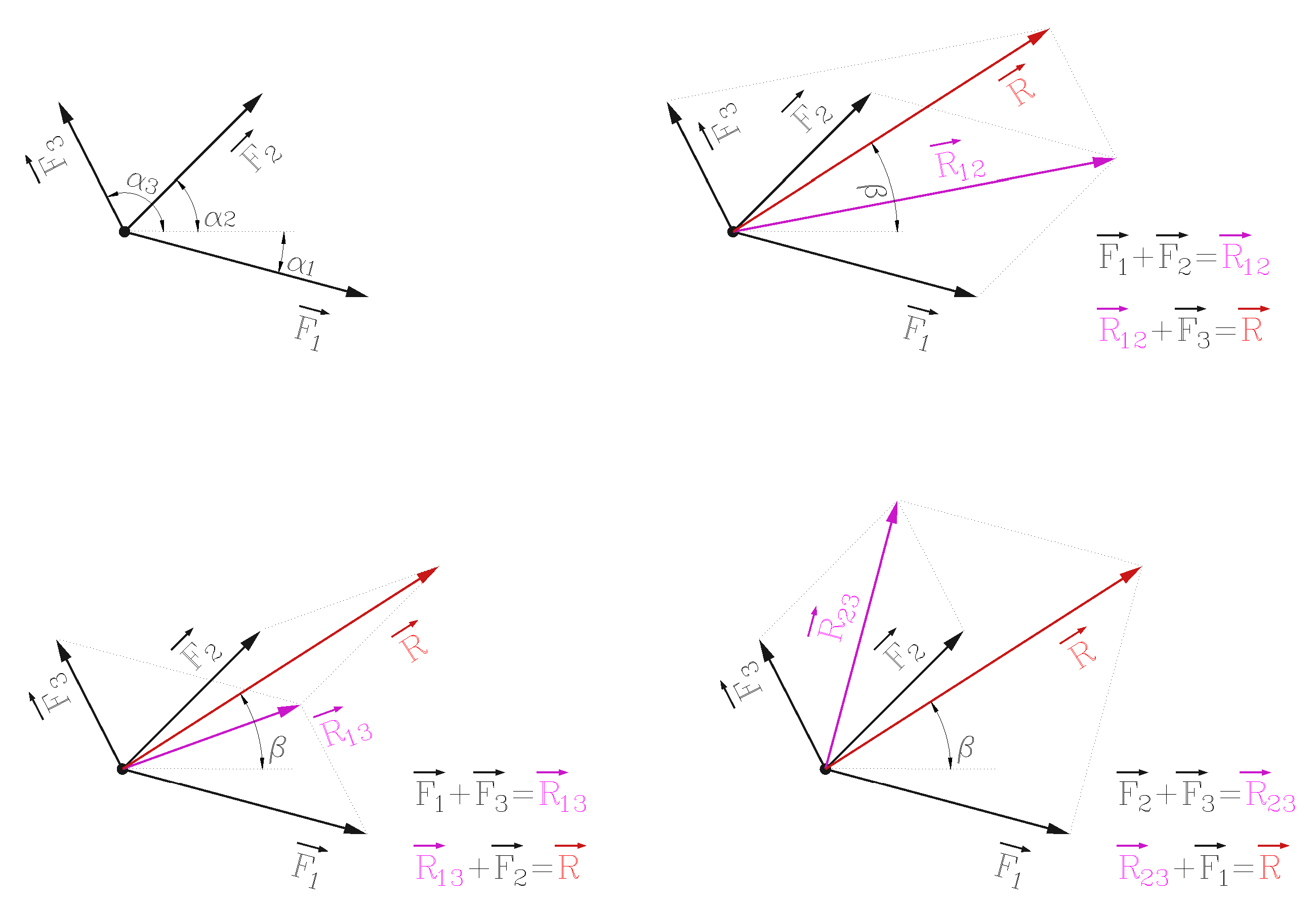
În toate cazurile se
obține același rezultat final: un vector ![]() la
fel de mare și cu aceeași orientare. Operația de adunare
vectorială are următoarele proprietăți esențiale:
la
fel de mare și cu aceeași orientare. Operația de adunare
vectorială are următoarele proprietăți esențiale:
· este comutativă: ![]() –
nu contează ordinea adunării vectorilor;
–
nu contează ordinea adunării vectorilor;
· este asociativă: ![]() –
nu contează cum asociem operanzii în vederea efectuării calculelor pe
etape.
–
nu contează cum asociem operanzii în vederea efectuării calculelor pe
etape.
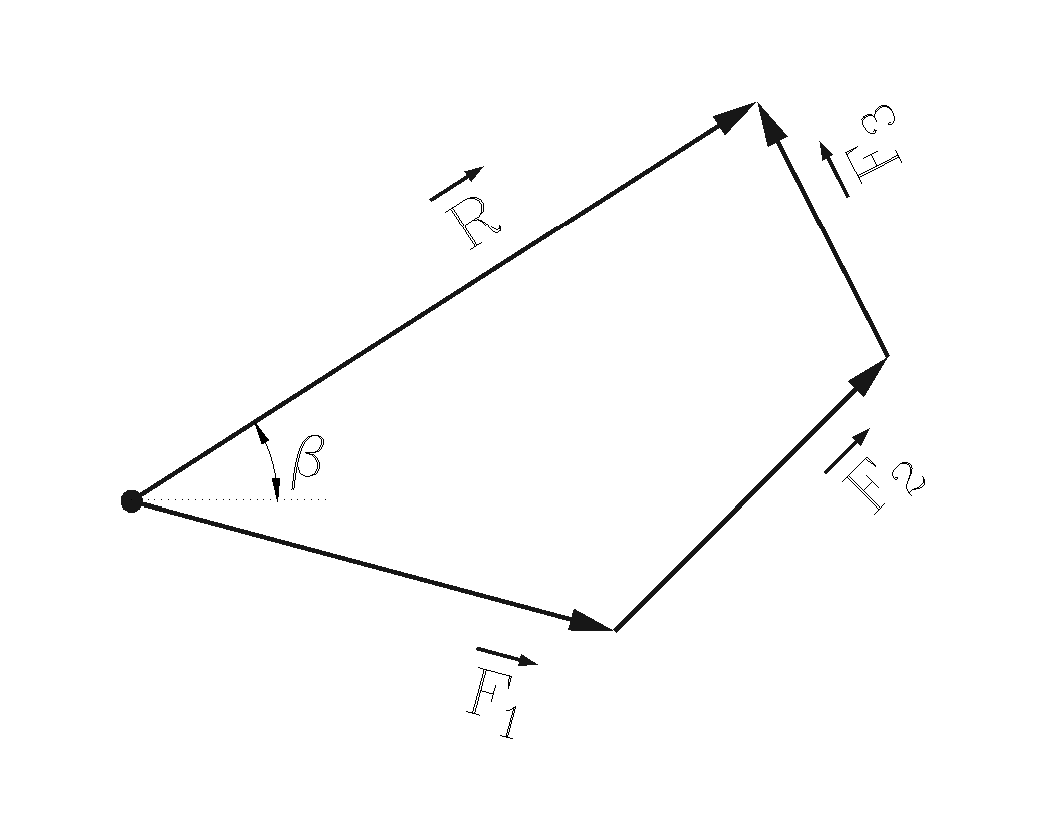
De asemenea, se poate
aplica regula poligonului și în cazul forțelor:
Metoda analitică de
compunere a vectorilor:
Mai întâi se descompun
toți vectorii în raport cu același sistem de coordonate:
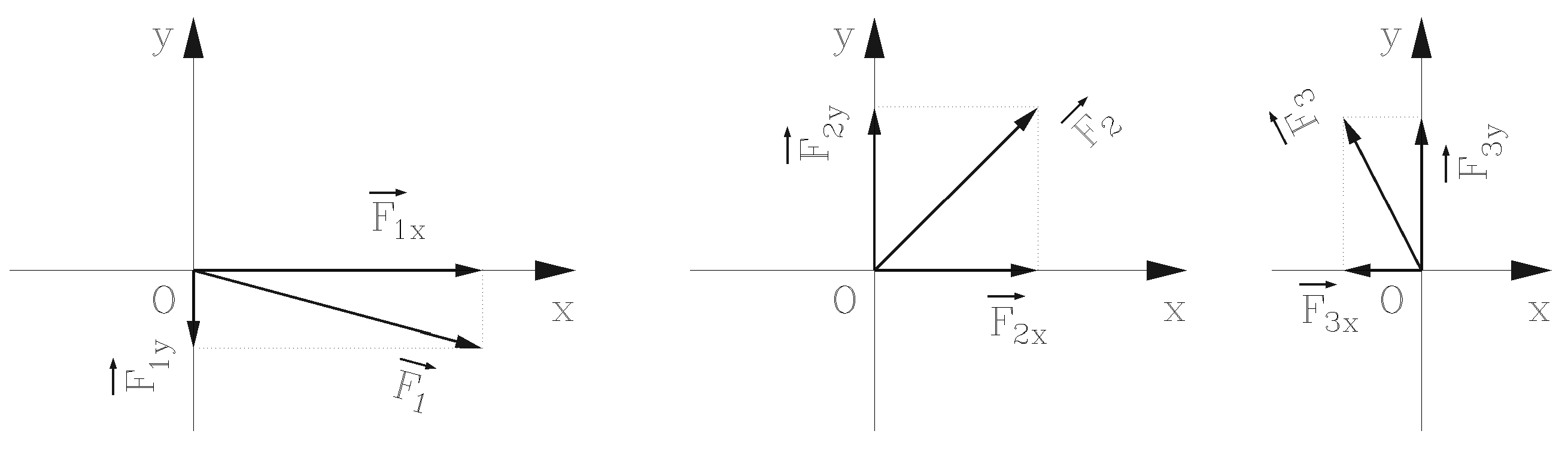
Analitic, aceste
descompuneri se exprimă astfel:
![]()
![]()
![]()
A compune 3 vectori de
direcții oarecare devine echivalent cu a compune 6 vectori: 3 orizontali și
3 verticali: ![]() .
.
Evident, că cel
mai convenabil este să se asocieze vectorii orizontali pe de-o parte și
vectorii verticali pe de altă parte: ![]() .
.
Avem rezultatele parțiale:
![]()
![]()
Se compun rezultatele
parțiale:
![]()
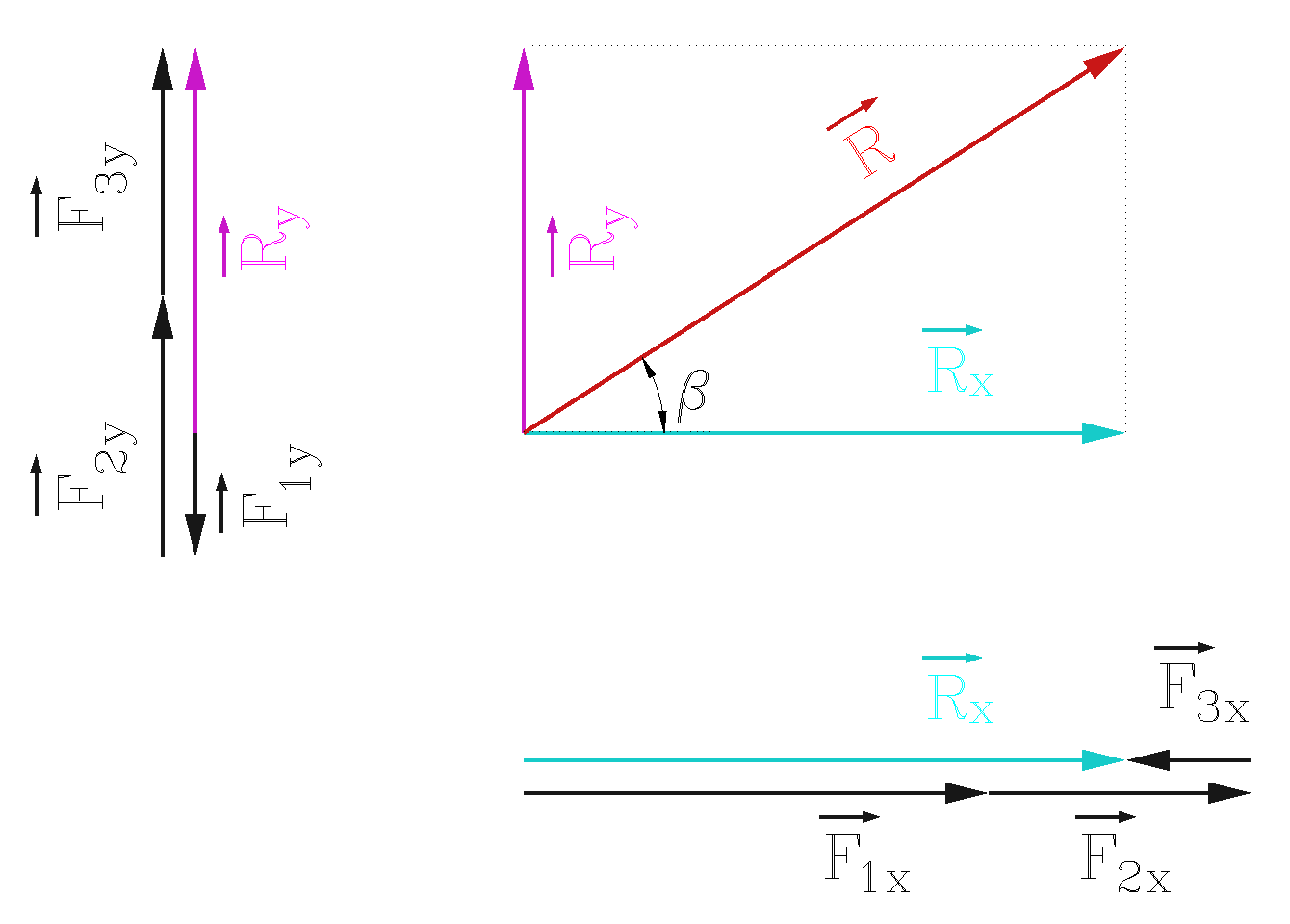
Se determină eventual mărimea și orientarea vectorului rezultant:
Extindere: vectori în spațiu
În raport cu un sistem de coordonate 3D, în care se definesc 3
versori ![]() ,
un vector oarecare are 3 componente:
,
un vector oarecare are 3 componente:
Produsul scalar a doi vectori
Produsul vectorial a doi vectori
![]()